Below please find my Ferdinand the Bull flower sniffing windmill tilting seeking the mind of God looking into the Abyss self-medicating from the tedium of life plunkings and dabblings.
Some thoughts:
There are properties about even the simplest animals that are lacking in machines, and which give rise to the amazingly adaptive behavior of animals. See my blog post on this.
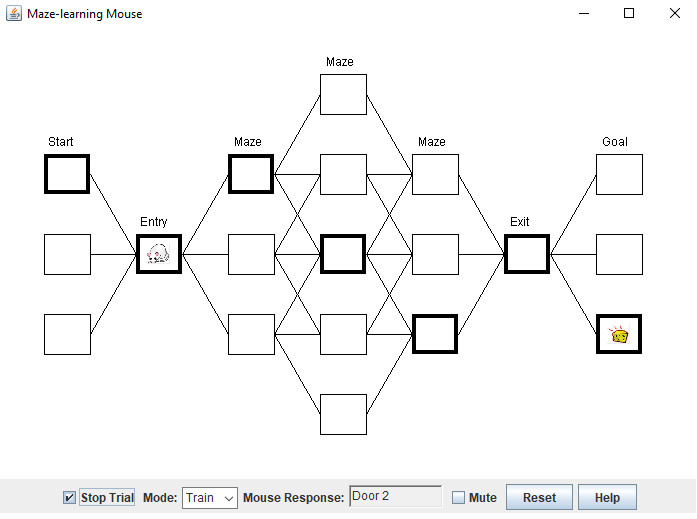
Mona is a goal-seeking neural network that learns hierarchies of cause and effect contexts. It exhibits stability, plasticity, and modularity (see the Mona, Elman, LSTM comparison paper). It also segregates response control from environmental state, control consisting of needs and the goal stimuli that satisfy them. For an overview of Mona, see the white paper. For demos, you can train a mouse to learn a maze or watch how a robot does it.
The question is not whether intelligent machines can have emotions, but whether machines
can be intelligent without any emotions.
-- The Society of Mind, by Marvin Minsky
Over the years I've become more and more convinced that there are three pieces to the world: self, non-self, and something in between -- an inner reality, which is a sort of mental tidal pool wherein ideas and images are born and die as we think. I think humans have a much larger inner reality than animals, and that is what allows us to do what we uniquely do: use symbols. Symbols are lenses put in place so that self can see worlds that do not exist (imagination), or exist in some different time or place. It is in the zone of inner reality that one can see oneself reflected and modeled, even so far as to see one's own beginning and end. Inner reality is also a source of despair for mature human minds, for as it grows and becomes more heavily populated with phantasms and shadows, self loses touch with outer reality, and this I think is what we call the loss of childhood or of our animal nature.
It would seem that by the time brains become sophisticated enough to observe and investigate themselves, they would have already become too complex to do so.
The neocortex as a "virtual reality helmet":
The sponge-like shape of the neocortex is indeed apropos as it sits astride the limbic system.
For its purpose is to soak up far reaches of time and space and render them, as though yet near
and present, to the old brain whose functions have persisted over millennia.
This is the inspiration of the Morphognosis model.
Tired of the same old Turing Test? Try the
Peanut Butter Intelligence Test!
Related: Goals and Intelligence.
George Mallory is famously quoted as having replied to the question, "Why did you want to climb Mount Everest?" with the retort, "Because it's there".
In kind we may also answer the question, "Why did you make that?" with, "Because it wasn't there".
We could do worse than this:
All watched over by machines of loving grace
Abstract:
GIL, a goal-directed inductive learning program, is presented. GIL learns without environment-dependent heuristics and without the "special" help of a teacher by modeling an abstraction of instrumental conditioning. In addition, GIL uses a secondary goal value learning mechanism as a substitute for state-space searching. GIL's learning of four problems is presented: (1) the game of tic-tac-toe, (2) a maze problem in which the ability to learn a novel maze was tested as a function of previous exposure to similar mazes, (3) a dual goal problem, and (4) a pattern recognition problem, in which "friend" and "foe" patterns were to be distinguished.
Dissertation.
Also available from ProQuest.
Abstract:
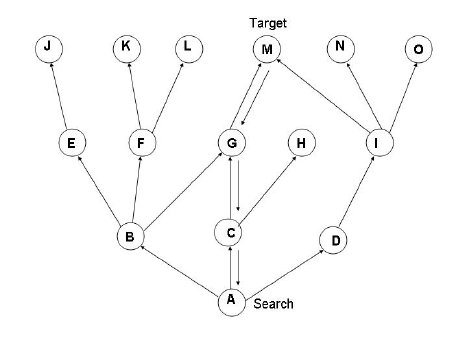
A technique for creating and searching a tree of patterns using relative distances is presented. The search is conducted to find patterns which are nearest neighbors of a given test pattern. The structure of the tree is such that the search time is proportional to the distance between the test pattern and its nearest neighbor, which suggests the anomalous possibility that a larger tree, which can be expected on average to contain closer neighbors, can be searched faster than a smaller tree. The technique has been used to recognize OCR digit samples derived from NIST data at an accuracy rate of 97% using a tree of 7,000 patterns.
Abstract:
This paper presents Mona, a connectionist model of motivation implemented by a network of neuron-like components whose interactions drive behavior toward goals which reduce homeostatic needs. The network incorporates a short term memory capability allowing it to model a state-space with relatively few neurons.
Paper.
Code (see prototypes project).
Abstract:
A distance quasi-metric for pattern recognition is presented. The "quasi" modifier distinguishes the metric from "true" metrics which obey a set of standard constraints. By relaxing one of the constraints, and coupling it with a fast multi-dimensional search technique, the metric demonstrates improved accuracy and efficiency compared to other popular metrics in recognizing hand-written digit samples. A high-level design of a fast optical comparator for computing the distance in O(sqrt(n)) is also presented.
Abstract:
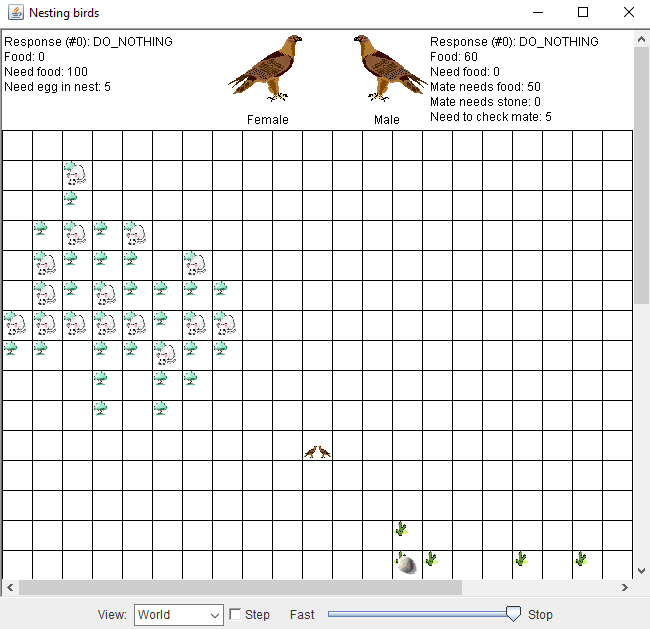
Goal-seeking in a connectionist model is demonstrated using the examples of foraging by a simulated ant and cooperative nest-building by a pair of simulated birds. The model, a control neural network, translates needs into responses. The purpose of this work is to produce lifelike behavior with a goal-seeking artificial neural network. The foraging ant example illustrates the intermediation of neurons to guide the ant to a goal in a semi-predictable environment. In the nest-building example, both birds, executing gender-specific networks, exhibit social nesting and feeding behavior directed toward multiple goals.
Paper.
Animation of the birds (zip).
Code (see prototypes project).
Abstract:
Multi-cellular organisms exhibit many mechanisms of intercellular communication for control and developmental purposes. Neurotransmitters, hormones, and signals mediating such processes as apoptosis and angio-genesis are but a few of these mechanisms. An abstraction of intercellular communication is presented here to provide a basis for constructing artificial life forms and self-organizing systems. Although the investigational vehicle is a cellular automaton, a cell in this context can be viewed in a broader sense. An intercellular signal is defined as a parameterized entity, a powerful paradigm that expresses not only lateral but also hierarchical and even recursive control structures. "Game of Life", L-System, Turing machine and other examples are included.
Fractal spiral
Spiraling glider guns
L-system
Turing machine
Bug
Code.
Abstract:
We investigate the management of flocking mobile objects using a parallel message-passing computer cluster. An octree, a data structure well-known for use in managing a 3D space, is adapted to “span” the cluster. Objects are distributed in the tree, and partitions of the tree are distributed among the processors in such a way that a minimum of global information is required to be shared by the processors. When objects move, the tree is modified accordingly; this in turn may cause partitions to migrate processors. Two constraints drive the distribution algorithm: (1) minimizing message traffic by clustering nearby objects on the same processor, and (2) processor load-balancing. Boids, flocking artificial life forms, embody the objects in this study. The performance of the system is measured in terms of the inter-processor message traffic as a function of the number, interactivity, and mobility of objects. An application of the scheme allows external clients to view objects in specified spatial loci.
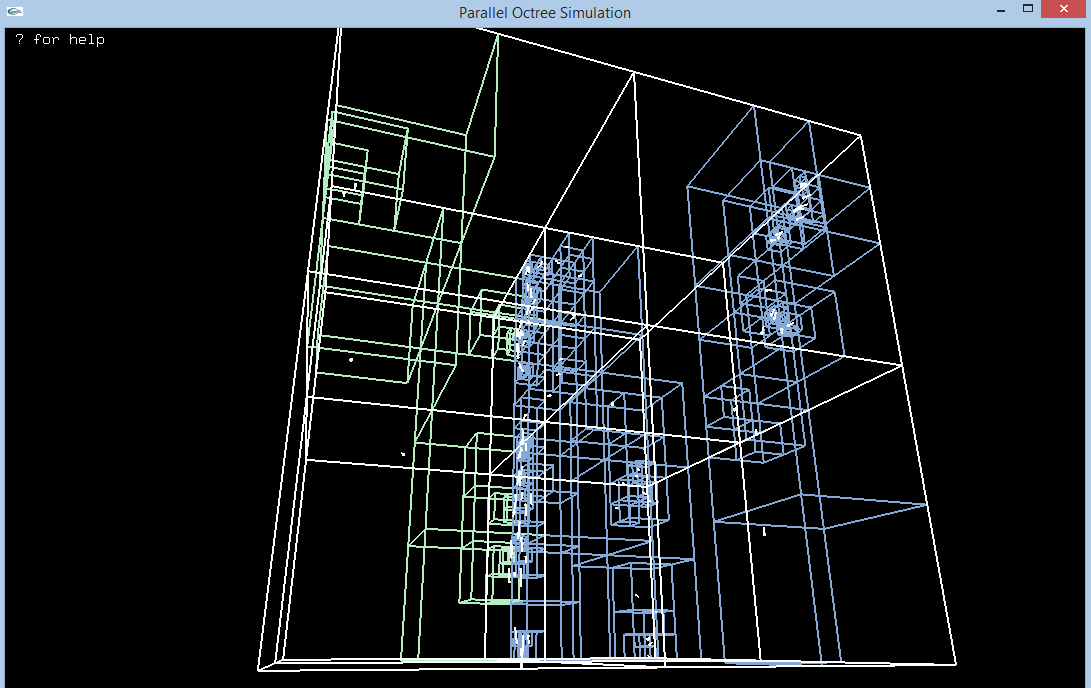
Paper.
Simulation (C++/OpenGL) and Lab (C++/PVM/OpenGL) code.
Abstract:
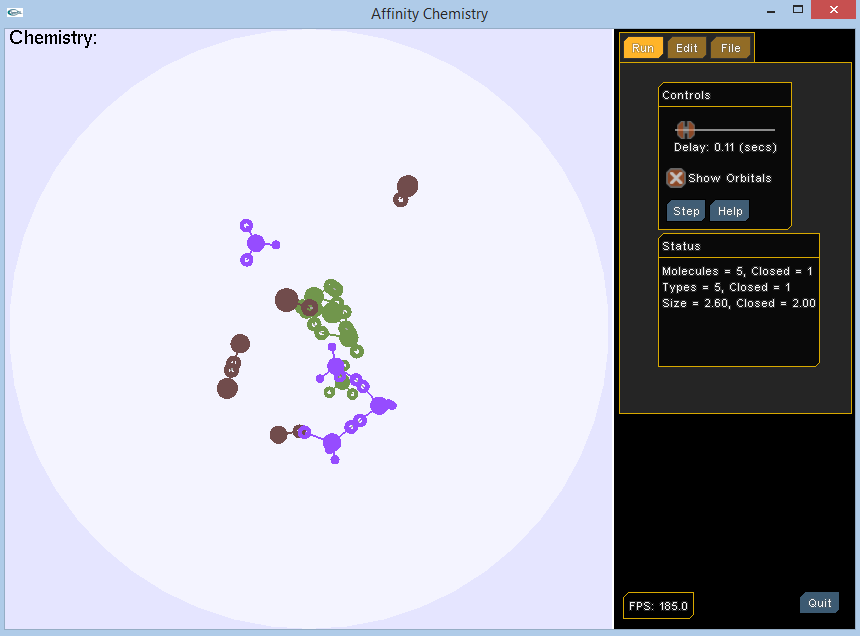
This paper describes an artificial chemistry featuring atoms and molecules moving and colliding in a continuous manner in a viscous fluid filling a 2D cellular space. Chemical reactions are mappings of discrete cellular configurations to parameterized actions on atoms. Actions allow atom creation and destruction, bonding and unbonding to make and break molecules, orientation, type change, and propulsion. Actions are easily added in this extensible model. An example involving a complex "foraging" reaction is provided as a demonstration of the capabilities of the framework. The reaction rules can be evolved by a genetic algorithm to exhibit a desired set of reactions. A portion of the foraging reaction was evolved to demonstrate this.
Abstract:
This paper instantiates an architecture for an artificial chemistry featuring continuous physics and discrete chemical reactions. A system of bonded complementary molecular strands replicates in the presence of a catalyst. The catalyst causes the strands to disengage; each strand subsequently regenerates its missing complement by bonding to free particles.
Abstract:
Spores is a push and pull peer-to-peer method of file sharing and storage, making use of publicly available space on the network. A user stores a file by pushing it to a set of peers. The file then becomes visible and available to remote peers that search for it. Spores allows the exchange of folders as well as individual files. To ensure a file operation references a specific file or folder by content, an MD5 uniqueness code can be used to specify the search or download. If both code and file name are given, the target must match both. An analysis of the storage and retrieval performance is presented.
Abstract:
Biological life is characterized by a robustness to noise often lacking in digital models. Although noise in the form of mutations has an important evolutionary purpose, it is also a threat that living systems are particularly adept at defending against. Artificial Life systems are frequently state-machines of some sort, requiring robustness mechanisms aimed at preserving and correcting state information. We explore a class of mechanisms based on robustness in transition dynamics rather than robustness in the emergent patterns of complex systems. We propose a Game of Life enhancement in which disrupting noise in the form of random state changes is corrected using a "light cone" of spatial and temporal context information. This enhancement does not change the original rules: a noiseless enhanced run is identical to an unenhanced run. We believe this general scheme could be applicable to other parallel computing systems in which contextual information determines state transitions.
Abstract:
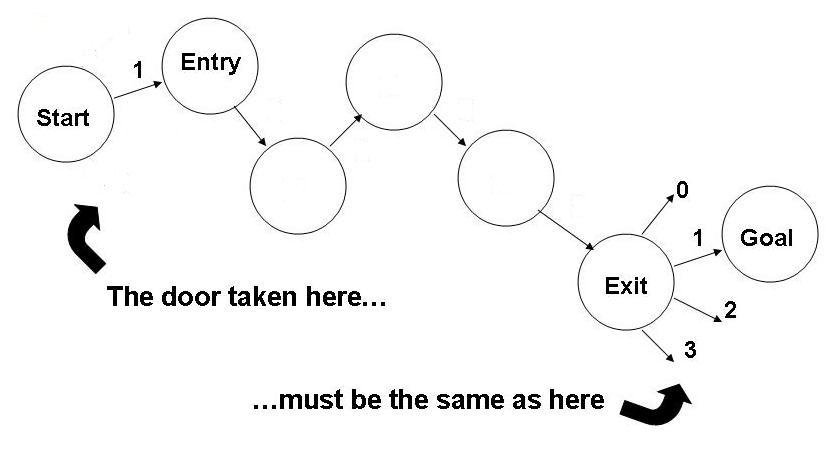
An important function of many organisms is the ability to use contextual information in order to increase the probability of achieving goals. For example, a street address has a particular meaning only in the context of the city it is in. In this paper, predisposing conditions that influence future outcomes are referred to as environmental contexts. These are learned by a goal-seeking neural network called Mona. A maze problem is used as a context-learning exercise. At the beginning of the maze, an initial door choice forms a context that must be remembered until the end of the maze, where the same door must be chosen again in order to reach a goal. Mona must learn these door associations and the intervening path through the maze. Movement is accomplished by expressing responses to the environment. The goal-seeking effectiveness of the neural network in a variety of maze complexities is measured.
Paper.
Tutorial.
Code (see maze project).
Train a mouse to solve a maze for cheese with Mona:
Application (zip).
Code.
Abstract:
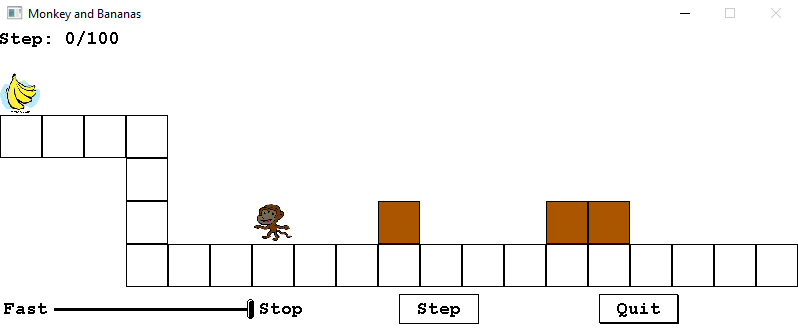
Instincts are a vital part of the behavioral repertoire of organisms. Even humans rely heavily on these inborn mechanisms for survival. Many creatures, for example, build elaborate nests without ever learning through experience. This paper explores this evolutionary legacy in the context of an artificial neural network. An instinct is defined as a simple stimulus-response sequence that is triggered by environmental and other events. The well-known "Monkey and Bananas" problem is used as a task situation. Instincts are "hard-wired" neurons in the brain of a monkey. Using a genetic algorithm, a population of monkeys evolved to successfully solve the task that none were able to solve by experience alone. The solutions were also found to be quite adaptable to variations in the task; in fact more so than a hand-crafted solution.
Paper.
Code (see instinct project).
Abstract:
LoCo (Location-based Cooperative) is a web service that allows people to cooperate on activities that are organized around locales. It allows users to add content-associated markers to a map and to view and search for markers based on selected criteria, such as content, dates, and user names and addresses. This service has many applications, for example, individuals might use it to locate others who are willing to buy or sell items and services that are only feasible to transport and/or utilize within a specific locale, such as piano lessons or leasing farm machinery.
Abstract:
An important function of many organisms is the ability to learn contextual information in order to increase the probability of achieving goals. For example, a cat may watch a particular mouse hole where she has experienced success in catching mice in preference to other similar holes. Or a person will improve his chances of getting back into his house by taking his keys with him. In this paper, predisposing conditions that affect future outcomes are referred to as environmental contexts. These conditional probabilities are learned by a goal-seeking neural network. Environmental contexts of varying complexities are generated that contain conditional state-transition probabilities such that the probability of some transitions is affected by the completion of others. The neural network is capable of expressing responses that allow it to navigate the environment in order to reach a goal. The goal-seeking effectiveness of the neural network in a variety of environmental complexities is measured.
Abstract:
Instinct and experience are shown to form a potent combination to achieve effective foraging in a simulated environment. A neural network capable of evolving instinct-related neurons and learning from experience is used as the brain of a simple foraging creature that must find food and water in a 3D block world. Instincts provide basic tactics for unsupervised exploration of the world, allowing pathways to food and water to be learned. The combination of both instinct and experience was found to be more effective than either alone. For comparison, neural network learning also proved superior to Q-Learning on the foraging task.
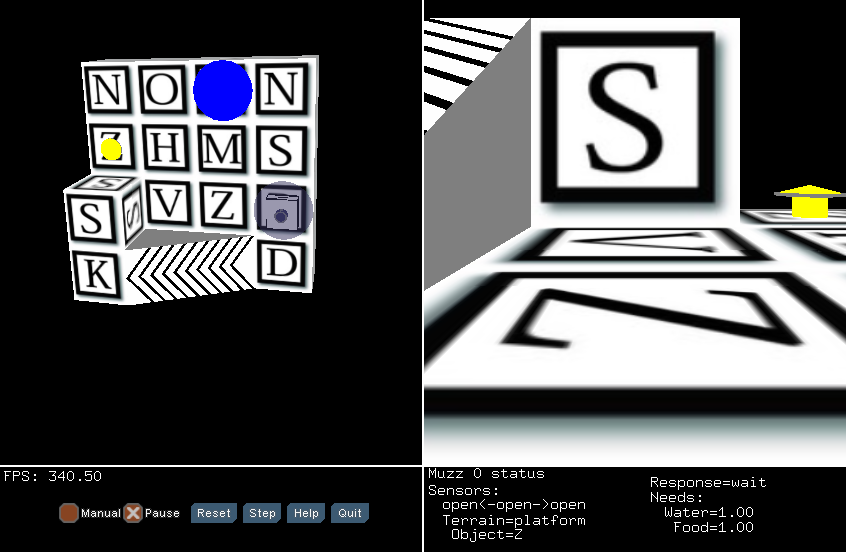
Paper.
Code (see muzz project).
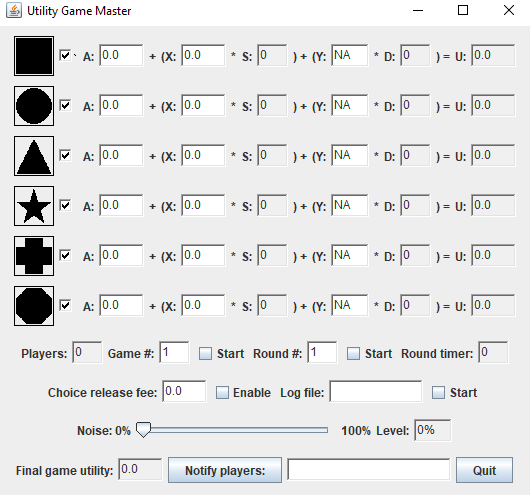
We have created a customizable web-based game which can be used to demonstrate the effects of network externalities on the adoption of new technologies. The game is freely available and can be played in a networked lab setting or via the Internet. This workshop will provide participants with step-by-step instructions for running several variations of the game which demonstrate network externality's affect on consumer utility, herding behavior and standardization. In addition, the workshop will demonstrate several ways that the game can be customized to address additional topics related to network externalities.
This game is web-based adaptation of Ruebeck et al.'s (2003) network externalities game. For this workshop, we will run the four variations of the game outlined in Ruebeck et al. In addition, we will discuss several ways that the game can be customized to address more advanced topics related to network externalities. In the basic game, students choose one of a number of competing technologies whose utility depends on the number of others choosing the same technology. In subsequent variations, we introduce sequential choice, imperfect information, heterogeneity and switching costs.
Paper.
Instructions: (html) and (pdf).
Master and Player apps.
(to run: java -jar GameMaster.jar/GamePlayer.jar or double-click) (zip).
Code.
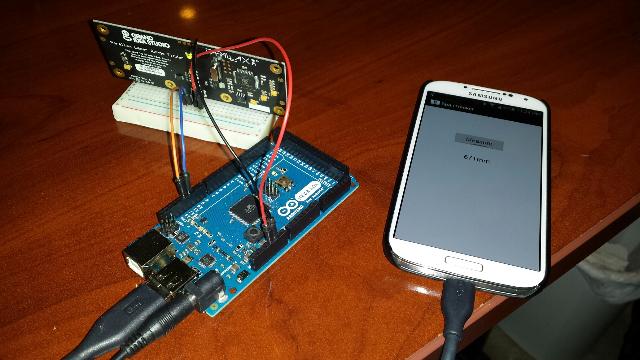
This is a robot controlled by a Mona neural network that learns T-mazes. It uses a realistic simulation of a robot body, physics, and sensors (laser range finder, webcam, and bumper) provided by Microsoft Robotics Studio.
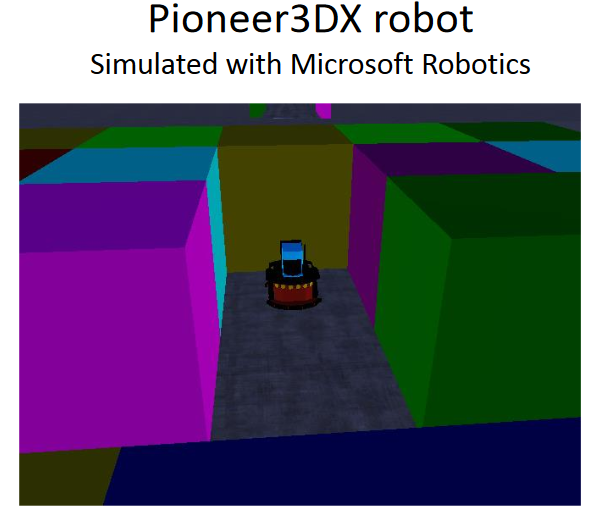
Demo (pdf)
(ppt)
Code (see atani project).
Abstract:
This study compares the maze-learning performance of three artificial neural network architectures: an Elman recurrent neural network, a Long Short-Term Memory (LSTM) network, and Mona, a goal-seeking neural network. The mazes are networks of distinctly marked rooms randomly interconnected by doors that open probabilistically. The mazes are used to examine two important problems related to artificial neural networks: (1) the retention of long-term state information and (2) the modular use of learned information. Addressing the former, mazes impose a context learning demand: at the beginning of the maze, an initial door choice forms a context that must be remembered until the end of the maze, where the same door must be chosen again in order to reach the goal. For the latter, the effect of modular and non-modular training is examined. In modular training, the door-associations are trained in separate trials from the intervening maze paths, and only presented together in testing trials. All networks perform well on mazes without the context learning requirement. Mona and LSTM perform well on context learning with non-modular training; Elman exhibits significantly degraded performance. Mona also performs well for modular training; both LSTM and Elman perform poorly with modular training.
Paper.
Request paper.
Code (see meta-maze project).
A Mox is a simple creature occupying a cell in Conway's Game of Life cellular automaton. It is input to the Game of Life rules as a live cell, although it is not affected by the rules. A mox has an orientation that allows it to sense color in one direction. It also has an omni-directional sense of smell for the proximity of food. Both of these senses have limited ranges. A mox is capable of moving forward, turning, and consuming food. There are two species of moxen: foragers and predators. A forager seeks a specific live cell state as food which it consumes by changing the cell to the dead state. A predator seeks forager moxen as food, which it also consumes by eradication. Each species is uniquely colored. Each mox is controlled by and learns using a Mona neural network. A primary purpose of the project is to tune the Mona parameters using a genetic algorithm.
Abstract:
This research proposes a novel method for ensuring fair governance of a common resource using asymmetric anonymity. We propose a system of resource governance that uses anonymous auditors instead of a regulatory agency. Self-enforcement and mutual enforcement are subject to fraud and collusion. In the proposed governance system, anonymity, often associated with negative online interactions, is employed in an asymmetric manner to mitigate these negative effects. This is done by assigning random anonymous auditors to a resource claimant. The claimants identity is known to the auditor. However, auditors identities are hidden from both the claimant and other auditors. Cheating, along with improper auditing, will result in penalties for both auditor and claimant. Improper auditing consists not only of allowing unlawful resource use, but also denying lawful use. This paper presents a proof of concept simulation using autonomous software agents and lays out the design for future experiments.
Paper.
Conformative Game:
A game testing the performance of a distributed administrative contract governing common resources.
Code.
Abstract:
Complex organisms exhibit both evolved instincts and experiential learning as adaptive mechanisms. In isolation, neither mechanism is sufficient to successfully navigate the environments of such organisms. Instincts provide behaviors that are generally adaptive but fail in specific cases. Learning must rely on some internal or external guidance to succeed on challenging tasks. This paper explores how instincts and experiential learning can work in tandem to solve a maze environment. Specifically, instincts comprise general knowledge of a set of related mazes representing worlds that an organism might be born into, and experiential learning discriminates specific situations in the particular maze world that an organism is born into. Synergy is accomplished by a hybrid neural network, one part instinctive and the other part capable of learning. After sufficient discriminating experiences, learning can override instinct to navigate a maze when instinct would otherwise fail. Results show a marked improvement in performance when this synergistic approach is employed relative to using either instincts or learning in isolation.
Paper.
Request paper.
Code (see minc project).
Goal: create a new generation of machine learning algorithms with human-like performance characteristics by using cortical computing primitives as their basis of operation.
Introduction.
Abstract book.
Mona poster.
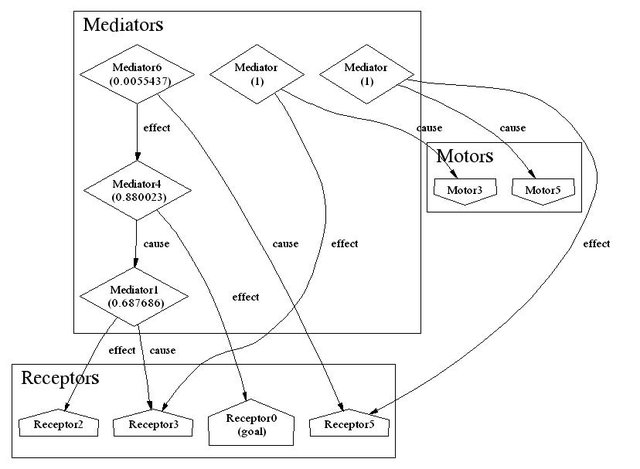
Abstract:
Mona is a goal-seeking artificial neural network (ANN) that learns hierarchies of cause andeffect contexts. These contexts allow Mona to predict future events. The structure of theenvironment is modeled in long-term memory; the state of the environment is modeled inworking memory. Mona is an active system: it uses environmental contexts to produceresponses that navigate the environment toward goal events that satisfy internal needs. Goal-seeking thus also filters learning to retain more relevant information about the environment.
Abstract:
A distance measuring device that works by spanning separately targeted endpoints is described. The device contains a laser rangefinder and sensing devices that track position and orientation changes, such an accelerometer and gyroscope respectively. Distance is measured by pointing the rangefinder at an endpoint and measuring the distance to it. Once this measurement is confirmed, the device is moved to a different vantage location to measure a second endpoint with the rangefinder. The orientation and position of the device for the second distance measurement relative to the first measurement are calculated by the position and orientation sensors. Together these values are sufficient to calculate the distance between the endpoints. This calculation is performed by a computer contained in the device and the distance displayed to the user. In this way a user can measure distances without placing a device at any of the endpoints or without having the endpoints in view at the same time.
![]()
Prototype:
Patent.
Demo code (see Castle).
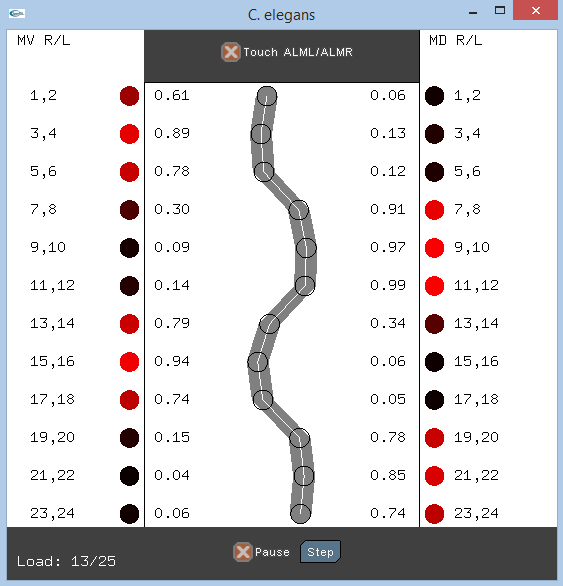
Abstract:
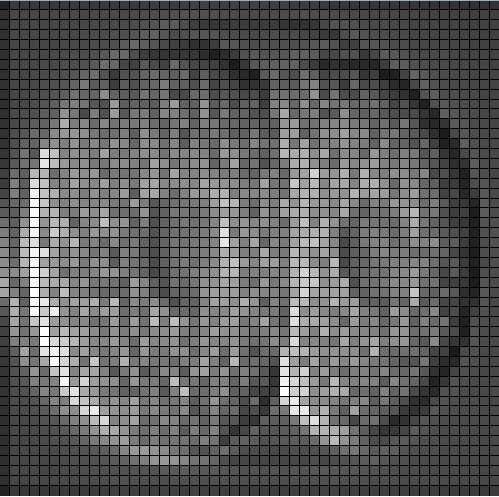
The C. elegans nematode worm is a small well-known creature, intensely studied for decades. Its entire morphology has been mapped cell-by-cell, including its 302 neuron connectome. The connectome is a synaptic wiring diagram that also specifies neurotransmitters and junction types. It does not however specify the synaptic connection strengths. It is believed that measuring these must be done in live specimens, requiring emerging or yet to be developed techniques. Without the connection strengths, it is not known how the nematode's nervous system produces behaviors. Discovering these strengths as a set of weights is a challenging and important problem: an artificial worm embodying the connectome and trained to perform a set of behaviors taken from measurements of the actual C. elegans would behave realistically in its environment. This is a crucial step toward creating a functional artificial creature. Indeed, knowing the artificial weights might cast light on the actual ones. In this project a genetic algorithm was used to train the entire connectome, a large space of 3680 synapse weights, to learn behaviors defined as sensory-motor sequences. It was found that utilizing the topology of the connectome for local optimization and crossover significantly boosts the performance of the genetic algorithm. Using a network of artificial neurons, random sequences involving the entire connectome were successfully trained. Additionally, for locomotion training, sinusoidal body postures were observed when sensory touch neurons were stimulated. Locomotion training was done using a Fourier Transform fitness function. Finally, using the NEURON tool to simulate a biologically higher fidelity network, the pharyngeal assembly of neurons was successfully trained.
Paper.
Request paper.
Results.
Video.
Code.
Abstract:
It is well known that artificial neural networks (ANNs) can learn deterministic automata. Learning nondeterministic automata is another matter. This is important because much of the world is nondeterministic, taking the form of unpredictable or probabilistic events that must be acted upon. If ANNs are to engage such phenomena, then they must be able to learn how to deal with nondeterminism. In this project the game of Pong poses a nondeterministic environment. The learner is given an incomplete view of the game state and underlying deterministic physics, resulting in a nondeterministic game. Three models were trained and tested on the game: Mona, Elman, and Numenta's NuPIC.
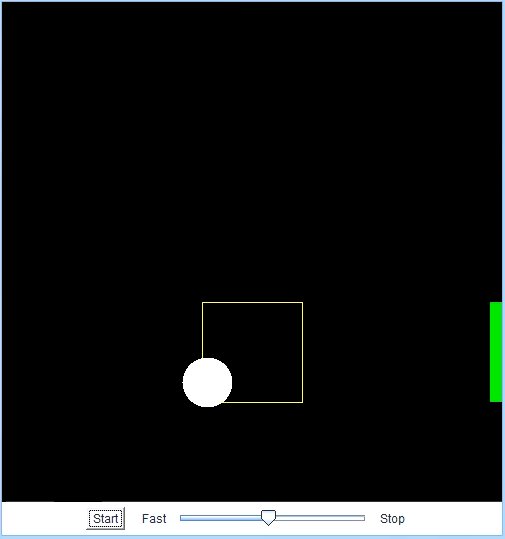
Game play video.
Code (see pong project).
Abstract:
A method is described for creating navigational landmarks using laser heating of surfaces adjacent to a mobile device which allow the device to track its orientation and position in the environment as it moves relative to the marks. This is accomplished by equipping the device with heat-inducing lasers and associated heat-sensing cameras. Orientation and position calculations are done by collating information about heat marks using various embodiments. Heat marks are distinguishable by temperature, pattern or color. The integration of the orientation and position changes allows the device to navigate its environment. The mobile device may be carried or contained within a vehicle that is autonomous or remotely controlled.
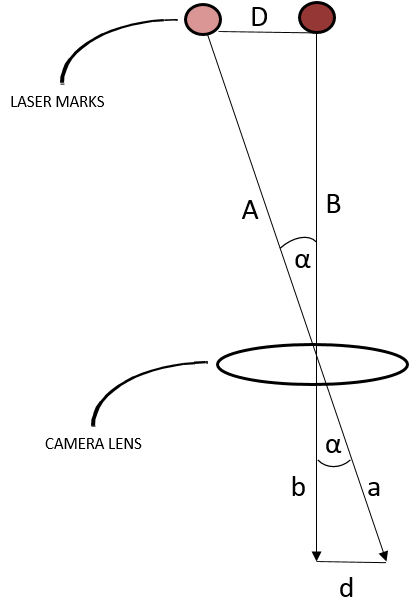
Provisional patent.
Demo video.
Demo code (see Castle+HeatTrack).
Abstract:
A method for improving the efficiency of graph isomorphism testing is presented. The method uses the structure of the graph colored by vertex hash codes as a means of partitioning vertices into equivalence classes, which in turn reduces the combinatorial burden of isomorphism testing. Unrolling the graph into a tree at each vertex allows structurally different regular graphs to be discriminated, a capability that the color refinement algorithm cannot do.
Abstract:
Lineage trees of embryonic development contain much subtle information about the embryogenetic process. One type of information is contained in how the order of nodes are sorted at each level of the tree. Sorting of lineage trees is accomplished using a specific criterion for all levels of the tree, resulting in new types of trees (e.g. differentiation tree). Another type of information can be revealed from pairwise comparisons of each type of tree. By using a binary classifier to quantify the first type of information (ordering by level), we can obtain a quantitative measure for the second type of information by using the Hamming distance between equivalent positions in two trees. In this paper, we introduce a method for calculating and visualizing the information content of embryogenesis called the information isometry technique. Information is extracted from developmental lineages using a binary classification system, and visualization is accomplished through the construction of isometric graphs, which re-represent a tree topology as a series of isometric lines. As the points representing each segment of an isometric line change color, there is a shift in the underlying tree and its constituent cells. Isometric graphs reveal a number of patterns within cell lineages, including the relative information content of specific subtrees.
Abstract:
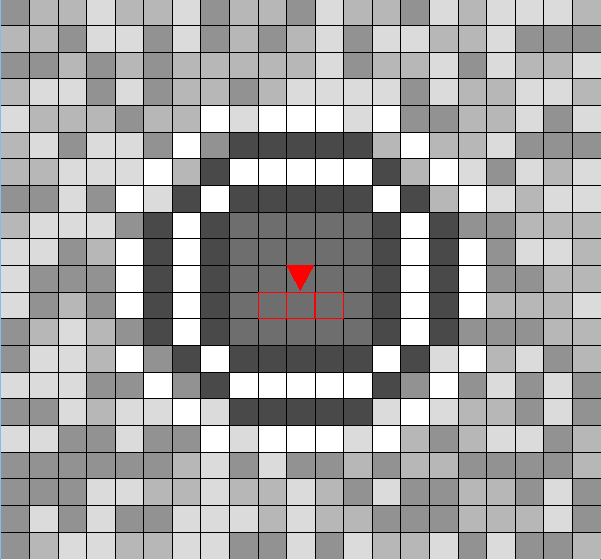
When an embryo develops, its cells exhibit interactions with other cells ranging from nearest neighbors to hormonal effects that can reach anywhere in the body, and are thus global in range. Some of these interactions are mechanical, and of intermediate range. Some involve propagating waves and some are hypothesized to involve diffusion gradients. We can generalize the concept of morphogenetic fields to encompass this full range of cell-cell interactions. These morphogenetic fields would then include the morphogenesis of cellular structures such as tissues and organs and the differentiation of the cells in them. Although there is a preponderance of evidence for the existence of morphogenetic fields of various types, there is also much that is unknown about many of them, including how they are expressed, sensed, and acted upon. Here we investigate a cellular automaton model, Morphozoic, which may be used to investigate the computational power of morphogenetic fields to foster the development of structures and cell differentiation. We are therefore assuming some equivalence between a living cell in an embryo and a cellular automaton cell. A cellular automaton (CA) is a network of elements (cells) that pass signals to one another, then send signals to other cells, depending on the signals that are received. Here we confine cells to a square grid as in ordinary cellular automata. The term "morphogenetic field" is used here to describe a generalized abstraction: a cell signals information about its state to its environment and is able to sense and act on signals from a subset of the other cells. The received set of signals determines the field value for the cell. The subsets are defined by nested neighborhoods that can represent local to global morphogenetic effects. Neighborhood signals are compacted into aggregated quantities, forming a precision gradient that caps the amount of information exchanged: signals from smaller, more local neighborhoods are thus more finely discriminated, while those from larger, more global neighborhoods are less so. Our model allows a cell to use this signaling scheme to determine and perform metamorphic actions, such as division, death, and state change (differentiation). An assembly of cells can thus cooperate to generate spatial and temporal structure. Unlike traditional cellular automata, such as the Game of Life, Morphozoic was found to be robust, redundant, and noise tolerant. Morphozoic is thus an enrichment of the space of cellular automata, which may give us some insight into the unsolved problem of how an embryo builds itself. The evidence for interactions over various distances in real embryos, up to global, is briefly reviewed. Applications of Morphozoic presented here include: (1) Conway's Game of Life, (2) cell regeneration, (3) evolution of a gastrulation-like sequence, (4) neuron pathfinding, and (5) a simulation of Turing's reaction-diffusion morphogenesis. An artificial neural network implementation also provides a noise tolerant generalization capability. Morphozoic provides a tool for exploring relationships between the whole and parts in many realms.
Relevance to artificial intelligence:
Morphozoic is a crossover message for artificial intelligence. AI research to a great degree focuses on the
brain and behaviors that the brain generates. But the brain, an extremely complex structure resulting from
millions of years of evolution, can be viewed as a solution to problems posed by the environment. There is a
common and somewhat ironic tendency to describe AI inputs and outputs in human cognitive terms, i.e. post-processed
brain output, such as symbolic variables.
An alternative approach, suggested by morphogenesis, is to view the environment as set of local/global,
spatial/temporal signal fields, and that the processing of fields is what spurs brain development. Organisms
are capable of performing amazing feats, such as navigation and nest-building, by the sensing of unique
environmental signals, such as polarized light, magnetism, and chemical scent trails. Morphogenesis makes
plain that signal fields can have powerful computing capabilities. Perhaps it is worth exploring artificial
intelligence as a solution to environments composed of these fields.
In keeping with nature's penchant for extending rather than replacing, the sponge-like shape of the mammalian
neocortex can be seen as symbolically apropos. For its purpose might be to soak up signals from far reaches of
time and space and render them, as though yet near and present, to the old brain whose instinctual role has
little changed over eons. The environmental gradients that clearly drive the behavior of simpler creatures
then becoming internalized in the nervous systems of more neurologically complex ones.
Paper.
Request paper.
Slides.
Video.
Code (see morphogenetic project).
Abstract:
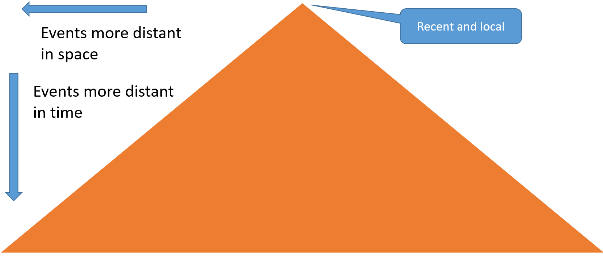
Artificial intelligence research to a great degree focuses on the brain and behaviors that the brain generates. But the brain, an extremely complex structure resulting from millions of years of evolution, can be viewed as a solution to problems posed by an environment existing in space and time. The environment generates signals that produce sensory events within an organism. Building an internal spatial and temporal model of the environment allows an organism to navigate and manipulate the environment. Higher intelligence might be the ability to process information coming from a larger extent of space-time. In keeping with natures penchant for extending rather than replacing, the purpose of the mammalian neocortex might then be to record events from distant reaches of space and time and render them, as though yet near and present, to the older, deeper brain whose instinctual roles have changed little over eons. Here this notion is embodied in a model called morphognosis (morpho = shape and gnosis = knowledge). Its basic structure is a pyramid of event recordings called a morphognostic. At the apex of the pyramid are the most recent and nearby events. Receding from the apex are less recent and possibly more distant events. A morphognostic can thus be viewed as a structure of progressively larger chunks of space-time knowledge. A set of morphognostics forms long-term memories that are learned by exposure to the environment. A cellular automaton is used as the platform to investigate the morphognosis model, using a simulated organism that learns to forage in its world for food, build a nest, and play the game of Pong.
Abstract:
The latency and throughput of blockchain-based cyrptocurrencies is a major concern for their suitability as mainstream currencies and as transaction processors in general. The prevalent proof-of-work scheme, exemplified by Bitcoin, is a deliberately laborious effort: the time and energy required to mine blocks makes the blockchain virtually immutable and assists in the consensus-reaching process. Coinspermia (coin=money + spermia=seed) is a different approach: transactions are concurrently seeded throughout a network of peer nodes to an extent sufficient to achieve a high reliability of essential currency operations, including the fast transfer of coins from an owner to a recipient, and the prevention of double spending. A number of Bitcoin features are retained in Coinspermia, including transaction input-outputs and cryptographic addresses and signing, but no special proof-of-work is required to commit transactions. Instead, a client can be assured of an operation completion when a sufficient percentage of network nodes acknowledge the operation, which could even occur before a transaction operation finishes propagating through the network. Simulation substantiates improved latency and throughput.
Abstract:
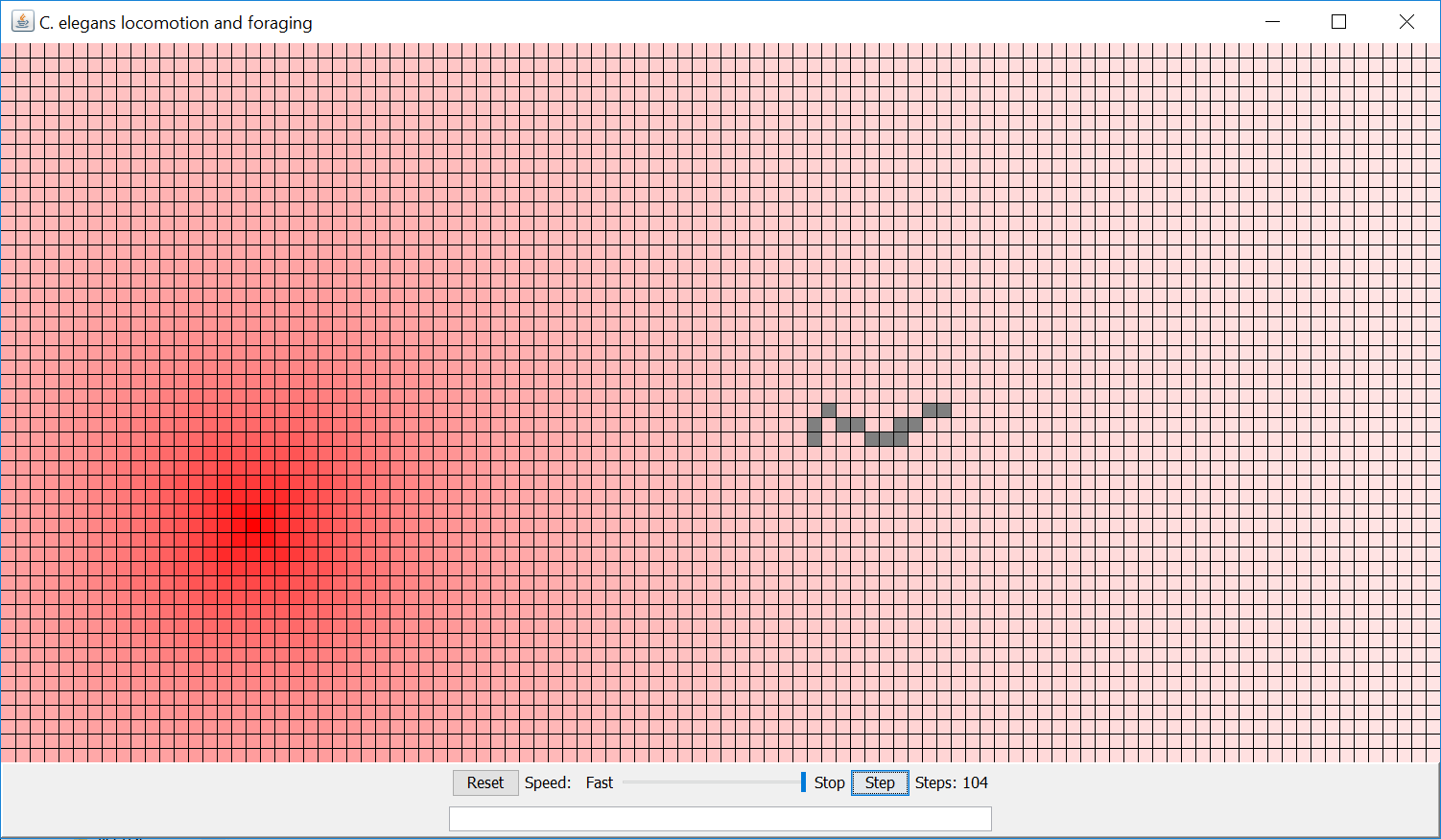
For decades, the tiny nematode worm C. elegans has been and continues to be a fount of biological information. Like all living things, this relatively simple creature survives and propagates in an environment that is fundamentally structured in space and time. The environment generates sequences of stimuli that produce sensory events within an organism and the organism responds to spatially navigate and manipulate the environment. Thus space and time are universalities that all living things must in some way reflect and represent. In biological research, the general aim is to discover how a species functions in some way. For this project, however, the behavior of C. elegans is analyzed with the aim of testing the applicability of an underlying common informational mechanism that models aspects of animal behaviors in general. The model is called morphognosis (morpho = shape and gnosis = knowledge). Its basic structure is a pyramid of event recordings. At the apex of the pyramid are the most recent and nearby events. Receding from the apex are less recent and possibly more distant aggregated events. In this project, the locomotion and foraging behaviors of C. elegans are learned and reproduced by morphognosis. A cellular automaton implements morphognosis, meaning that the locomotion and foraging behaviors are decomposed into cellular automaton rules which are then learned by an artificial neural network that is capable of generalizing to handle novel environmental stimuli.
Abstract:
The adoption of powerful software tools and computational methods from the software industry by the scientific research community has
resulted in a renewed interest in integrative, large-scale biological simulations. These typically involve the development of computational
platforms to combine diverse, process-specific models into a coherent whole. The OpenWorm Foundation is an independent research organization
working towards an integrative simulation of the nematode Caenorhabditis elegans, with the aim of providing a powerful new tool to
understand how the organism's behaviour arises from its fundamental biology. In this perspective, we give an overview of the history
and philosophy of OpenWorm, descriptions of the constituent sub-projects and corresponding open-science management practices, and discuss
current achievements of the project and future directions.
This article is part of a discussion meeting issue Connectome to behaviour: modelling C. elegans at cellular resolution
Abstract:
We can improve our understanding of biological processes through the use of computational and mathematical modeling. One such morphogenetic process (ommatidia formation in the Drosophila eye imaginal disc) provides us with an opportunity to demonstrate the power of this approach. We use a high-resolution image that catches the spatially- and temporally-dependent process of ommatidia formation in the act. This image is converted to quantitative measures and models that provide us with new information about the dynamics and geometry of this process. We approach this by addressing three computational hypotheses, and provide a publicly-available repository containing data and images for further analysis. Potential spatial patterns in the morphogenetic furrow and ommatidia are summarized, while the ommatidia cells are projected to a spherical map in order to identify higher-level spatiotemporal features. In the conclusion, we discuss the implications of our approach and findings for developmental complexity and biological theory.
Abstract:
A species of pufferfish builds fascinating circular nests on the sea floor to attract mates. This project simulates the nest building behavior in a cellular automaton using the Morphognosis model. The model features hierarchical spatial and temporal contexts that output motor responses from sensory inputs. By considering the biological neural network of the pufferfish as a black box, decomposing only its external behavior, an artificial counterpart can be generated. In this way a complex biological system producing a behavior can be filtered into a system containing only functions that are essential to reproduce the behavior. The derived system not only has intrinsic value as an artificial entity but also might help to ascertain how the biological system produces the behavior.
Artifical nest.

Actual nest.
Video.
Request paper.
Code.
Abstract:
One of the goals of the OpenWorm project is to promote awareness of the biology of the C. elegans nematode worm. In the robotics subproject, this takes the form of creating physical implementations of the worm which approximate prevalent scientific models. The downside of this is that C. elegans is, of course, not a robot. However, simulating the worm in robotic form manifests a tangible aspect that pure software models do not possess. A worm robot also sidesteps working with the actual worm, a transparent 1mm organism, which requires special conditions and equipment, such as lighting and microscopes. Another aim of the robotics effort is to foster crossover education in biology, robotics, and coding. This might take the form of either specifying or producing kits of parts that can be assembled by students in school settings or by generally interested parties. This paper discusses other biological robotics efforts and describes in detail the latest OpenWorm robots produced in conjunction with Out of the BOTS robotics.
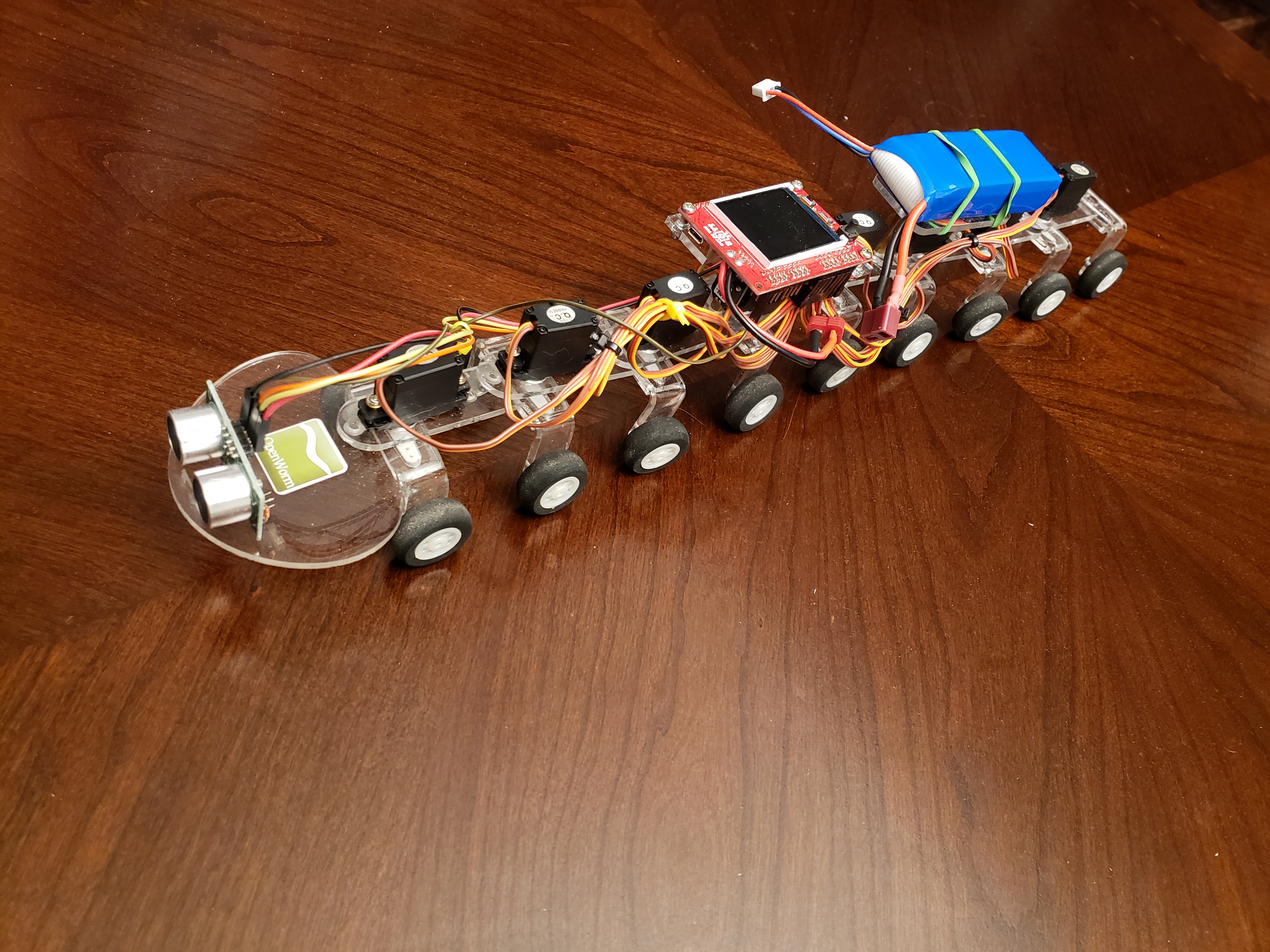
C. elegans robot.
Video.
Code and assembly.
Abstract:
This study compares the modularity performance of two artificial neural network architectures: a Long Short-Term Memory (LSTM) recurrent network, and Morphognosis, a neural network based on a hierarchy of spatial and temporal contexts. Mazes are used to measure performance, defined as the ability to utilize independently learned mazes to solve mazes composed of them. A maze is a sequence of rooms connected by doors. The modular task is implemented as follows: at the beginning of the maze, an initial door choice forms a context that must be retained until the end of an intervening maze, where the same door must be chosen again to reach the goal. For testing, the door-association mazes and separately trained intervening mazes are presented together for the first time. While both neural networks perform well during training, the testing performance of Morphognosis is significantly better than LSTM on this modular task.
ResearchGate and arXiv paper.
Code.
Invest is a stock market and crypto investor using data from Alpha Vantage. It uses a time series of past closing prices to predict future closing prices for selected stocks. LSTM, TCN, Morphognosis, and Polyfit predictors can be used.
Code.
Abstract:
Honey bees are social insects that forage for flower nectar cooperatively. When an individual forager discovers a flower patch rich in nectar, it returns to the hive and performs a "dance" in the vicinity of other bees that consists of movements communicating the direction and distance to the nectar source. The bees that receive this information then fly to the location of the nectar to retrieve it, thus cooperatively exploiting the environment. This project simulates this behavior in a cellular automaton using the Morphognosis model. The model features hierarchical spatial and temporal contexts that output motor responses from sensory inputs. Given a set of bee foraging and dancing exemplars, and exposing only the external input-output of these behaviors to the Morphognosis learning algorithm, a hive of artificial bees can be generated that forage as their biological counterparts do.

Honey bee dance.
ResearchGate and bioRxiv paper.
Video.
Code.
Abstract:
A device is described to support the analysis of skin tissue and anomaly detection using transdermal light. The handheld device operates in contact with the skins surface. It contains light sources that emit light directed into the skin of suitable intensity and wavelengths such that the light penetrates into the epidermis and dermis. A set of photodetectors contained in the device detect returning light that is reflected from and scattered by various types and shapes of tissues on and within the skin. The detected light provides three dimensional information about the skin under the device. This information is subsequently available for analysis and anomaly and lesion detection by various means, such as tomographic reconstruction and deep learning. A sequence of patterns can be produced by scanning the device across the surface of the skin, creating tissue baselines and body maps. Subsequent scans would allow changes to be detected.
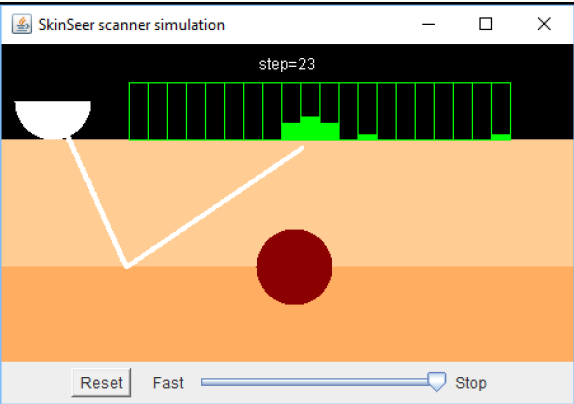
Demo.
Documents: provisional patent and simulation.
Code.
Fundraiser on experiment.
Abstract:
Biological development is often described as a dynamic, emergent process. This is evident across a variety of phenomena, from the temporal organization of cell types in the embryo to compounding trends that affect large-scale differentiation. To better understand this, we propose combining quantitative investigations of biological development with theory-building techniques. This provides an alternative to the gene-centric view of development: namely, the view that developmental genes and their expression determine the complexity of the developmental phenotype. Using the model system Caenorhabditis elegans, we examine time-dependent properties of the embryonic phenotype and utilize the unique life-history properties to demonstrate how these emergent properties can be linked together by data analysis and theory-building. We also focus on embryogenetic differentiation processes, and how terminally-differentiated cells contribute to structure and function of the adult phenotype. Examining embryogenetic dynamics from 200 to 400 min post-fertilization provides basic quantitative information on developmental tempo and process. To summarize, theory construction techniques are summarized and proposed as a way to rigorously interpret our data. Our proposed approach to a formal data representation that can provide critical links across life-history, anatomy and function.
Abstract:
Biological neural networks operate in the presence of task disruptions as they guide organisms toward goals. A familiar stream of stimulus-response causations can be disrupted by subtask streams imposed by the environment. For example, taking a familiar path to a foraging area might be disrupted by the presence of a predator, necessitating a "detour" to the area. The detour can be a known alternative path that must be dynamically composed with the original path to accomplish the overall task. In this project, overarching base paths are disrupted by independently learned path modules in the form of insertion, substitution, and deletion modifications to the base paths such that the resulting modified paths are novel to the network. The network's performance is then tested on these paths that have been learned in piecemeal fashion. In sum, the network must compose a new task on the fly. Several network architectures are tested: Time delay neural network (TDNN), Long short-term memory (LSTM), Temporal convolutional network (TCN), and Morphognosis, a hierarchical neural network. LSTM and Morphognosis perform significantly better for this task.
ResearchGate and arXiv paper.
Code.